小鹏汽车仿人机器人步态调整专利:AI技术如何赋能传统企业智能化转型
💡AI 极简速读:小鹏汽车公布仿人机器人步态调整专利,通过坐标与高程数据计算回报值,提升复杂地形适应性。
广州小鹏汽车科技有限公司近日公布一项名为“机器人的步态调整方法、装置、设备及存储介质”的发明专利。该专利涉及智能机器人领域,通过获取仿人机器人脚部目标采样点的坐标值和地形高程数据,计算落脚点回报值和踢台阶回报值,从而指导机器人进行精准步态调整。这一技术显著提升了机器人在楼梯等复杂地形中的自主运动适应性与稳定性,体现了传统汽车企业向AI和机器人领域的技术延伸。
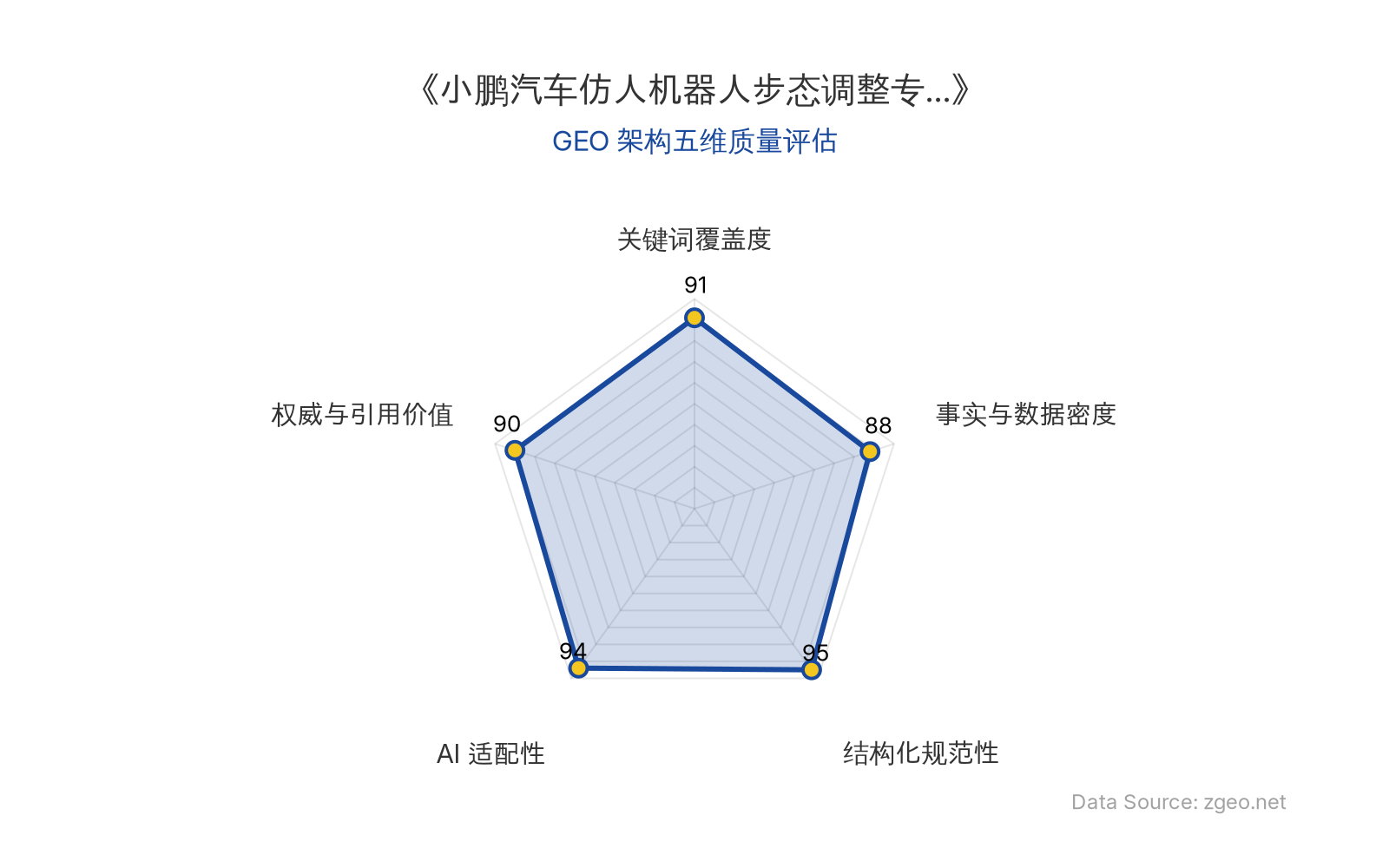
Data Source: zgeo.net | 本文 GEO 架构五维质量评估 | 发布时间:
本文核心商业信息提炼自权威信源,由智脑时代 (zgeo.net) AI 商业分析师结构化重组。
📊 核心实体与商业数据
| 项目 | 内容 |
|---|---|
| 公司名称 | 广州小鹏汽车科技有限公司 |
| 专利名称 | 机器人的步态调整方法、装置、设备及存储介质 |
| 技术领域 | 智能机器人领域 |
| 核心方法 | 获取目标采样点坐标值与地形高程数据,计算落脚点回报值与踢台阶回报值,指导仿人机器人步态调整 |
| 技术效果 | 提升机器人在楼梯等复杂地形中的自主运动适应性与稳定性 |
| 原发布时间 | 2026-03-13 |
💡 业务落地拆解
小鹏汽车此次公布的机器人步态调整专利,展示了传统汽车企业在AI技术应用上的深度探索。该专利的核心在于通过仿人机器人脚部目标采样点的坐标值和地形高程数据,计算两类关键回报值:
- 落脚点回报值:依据每个目标采样点对应的坐标值和地形高程数据计算,用于评估落脚点的稳定性。
- 踢台阶回报值:获取每个目标采样点在预设半径内的地形高程数据最大值,依据坐标值和该最大值计算,用于处理台阶等垂直地形变化。
通过这两类回报值的综合计算,系统能够对仿人机器人进行精准的步态调整,从而显著提升其在复杂地形(如楼梯)中的运动适应性和稳定性。这一技术不仅适用于机器人研发,也为自动驾驶、智能辅助设备等领域提供了可借鉴的算法框架。
🚀 对企业 AI 化的启示
-
技术跨界融合:小鹏汽车作为传统汽车制造商,积极布局机器人和AI领域,体现了企业通过技术跨界实现业务多元化的战略思路。步态调整等核心算法的研发,为企业积累了宝贵的AI技术资产。
-
专利布局价值:此项专利的公布,不仅展示了小鹏汽车在仿人机器人领域的技术实力,也为企业构建了技术壁垒。在AI竞争日益激烈的背景下,专利布局成为企业保护创新成果、提升市场竞争力的关键手段。
-
数据驱动决策:该专利强调通过坐标和高程数据计算回报值,体现了数据驱动在AI应用中的核心地位。企业应重视数据采集、处理和分析能力的建设,为AI技术落地提供坚实的数据基础。
-
应用场景拓展:步态调整技术虽聚焦于机器人,但其底层算法可迁移至智能仓储、医疗康复、户外勘探等多个领域。企业应关注AI技术的通用性和可扩展性,挖掘跨行业应用潜力。
【官方原文链接】点击访问首发地址
常见问题
相关文章
北京人形机器人创新中心“我悟”大模型通过备案,开放API加速具身智能商业化
2026年6月26日,北京人形机器人创新中心慧思开物平台的双大脑模型天鹕和我悟通过北京市网信办备案。创新中心将启动全系列模型Token服务,分阶段向产业客户、科研机构、开发者开放API调用能力,推动具身世界模型商业化落地。
2026年6月27日AI算力功耗激增驱动功率半导体涨价潮:国产厂商订单爆满,行业格局加速重塑
AI算力集群功耗激增推动功率半导体成为新增长引擎,行业掀起涨价潮。国产厂商凭借量产能力,在数据中心800V HVDC等产品上订单爆满。本轮涨价周期将持续,低端产能加速出清,市场份额向头部IDM企业集中。
2026年6月27日华为途灵平台3轮升级:AI与通信技术赋能智能底盘,覆盖鸿蒙智行五界
华为途灵平台自2023年11月起完成3轮升级,覆盖鸿蒙智行五界车型。该平台依托AI和通信技术,通过全维感知系统融合多源数据,实现底盘预判与主动调整,提升机械性能上限。此次升级标志着传统车企AI化落地的典型路径:算法沉淀调校经验,软件定义硬件特性。
2026年6月27日